3.2.3. Os inputs do volante e as paddle shifters
Para complementar o realismo e a precisão dos comandos no simulador o volante contará com três tipos de entradas digitais: Switch fim de curso para as “borboletas” (paddle shifters); Encoders rotativos com push-button (seletores multifuncionais); Botões sem trava à prova d’água para demais comandos;
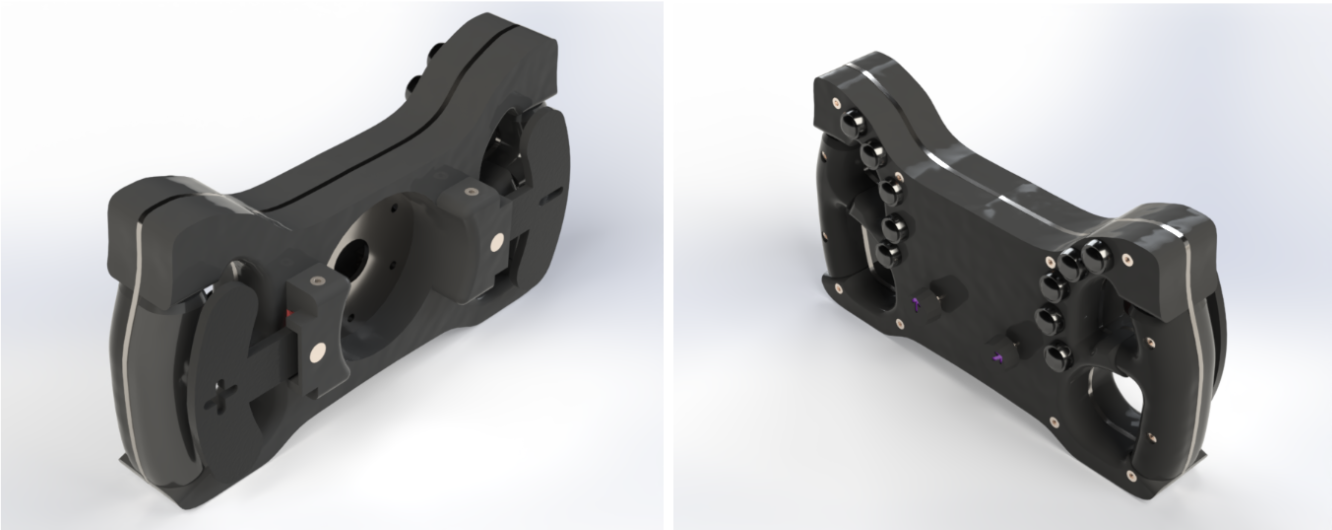
 Figuras 2 e 3: Botões, seletor e paddle shifter
Figuras 2 e 3: Botões, seletor e paddle shifter
Modelo Adotado:
Componente
Especificação típica
Switch fim de curso (paddle)
• Tipo: micro-switch metálico de alavanca
• Contato: SPDT (C-NA-NF)
• Tensão máx.: 125 VAC / 250 VAC
• Corrente máx.: 5 A
• Vida útil mecânica: > 1 × 10⁶ ciclos
• Dimensões aproximadas: 29 × 11 × 6 mm
Encoder rotativo EC11
• Tipo: incremental com botão
• Pulsos por volta: 20
• Push-button integrado
• Tensão de operação: 5 V
• Eixo: 15 mm (entalhado)
• Vida útil: > 30.000 ciclos
• Dimensões: ~18 × 15 mm
Botão sem trava
• Tipo de contato: NA (normalmente aberto)
• Tensão máx.: 125 VAC (3 A) / 220 VAC (1,5 A)
• Grau de proteção: IP65 (à prova d’água)
• Dimensões: 12 mm (corpo ~18 × 17,5 mm)
• Peso: ~ 4 g
Como será acionada:
Switch fim de curso (paddles): Conectados diretamente a dois pinos digitais do Arduino Pro Micro (configurados com pull-up interno). Quando o usuário “pressiona” a borboleta, a alavanca do micro-switch é deslocada, mudando o contato interno de NA para NF, gerando uma borda de subida/descida digital.
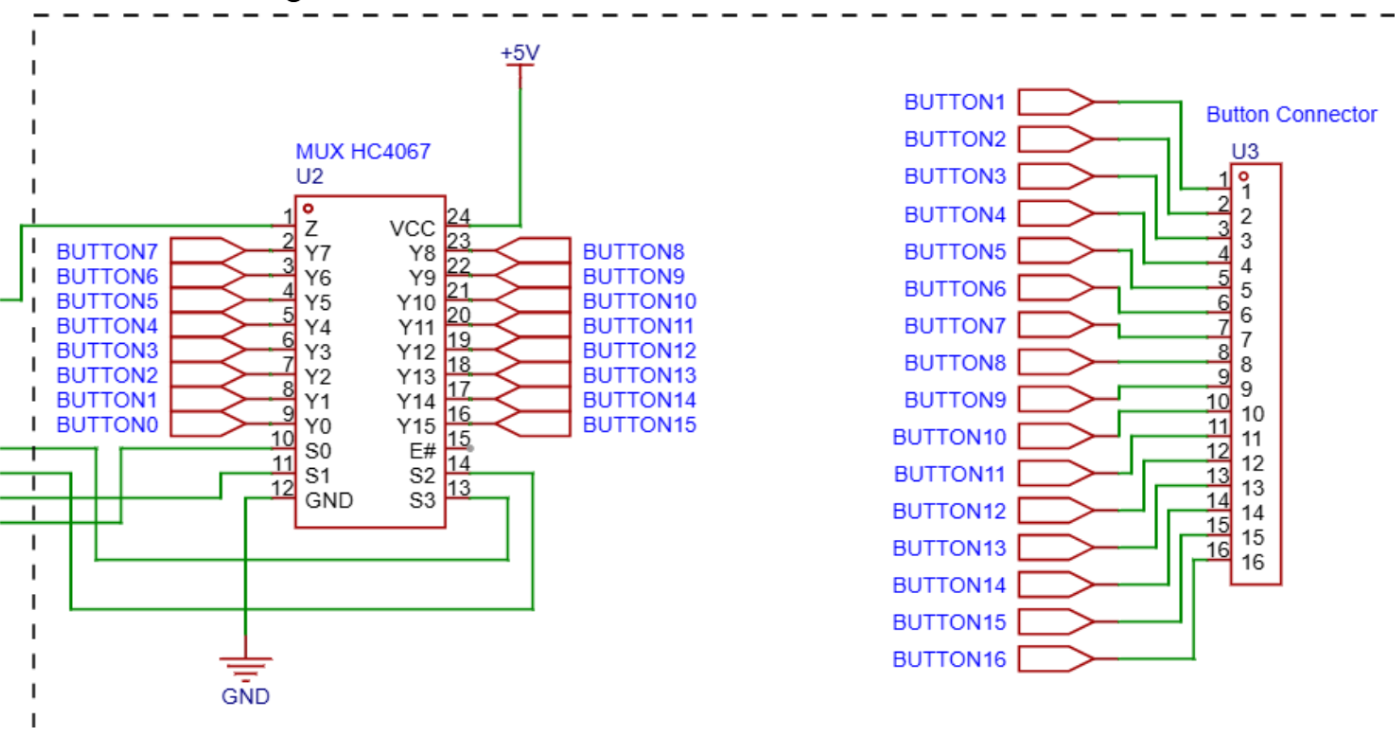 Figura 4: Multiplexação dos inputs
Figura 4: Multiplexação dos inputs
Botão 12 mm: Fecha o contato NA momentaneamente ao ser pressionado. Todos os 10 botões são encaminhados ao Arduino através de um MUX HC4067 as linhas S0–S3 do HC4067 definem qual canal está ativo. O pino Z do HC4067 é lido e se o botão selecionado estiver pressionado ele retorna nível lógico ativo. O firmware varre ciclicamente todos os canais do MUX, detectando qual botão foi acionado.
Encoders rotativos EC11: Cada encoder possui duas saídas digitais (A e B) que geram sinais em quadratura conforme o eixo gira. Além disso, possuem botão integrado (push-button NA), conectado a um terceiro pino digital. Os sinais são interpretados pelo Arduino via polling ou interrupções, permitindo determinar direção de rotação e cliques.
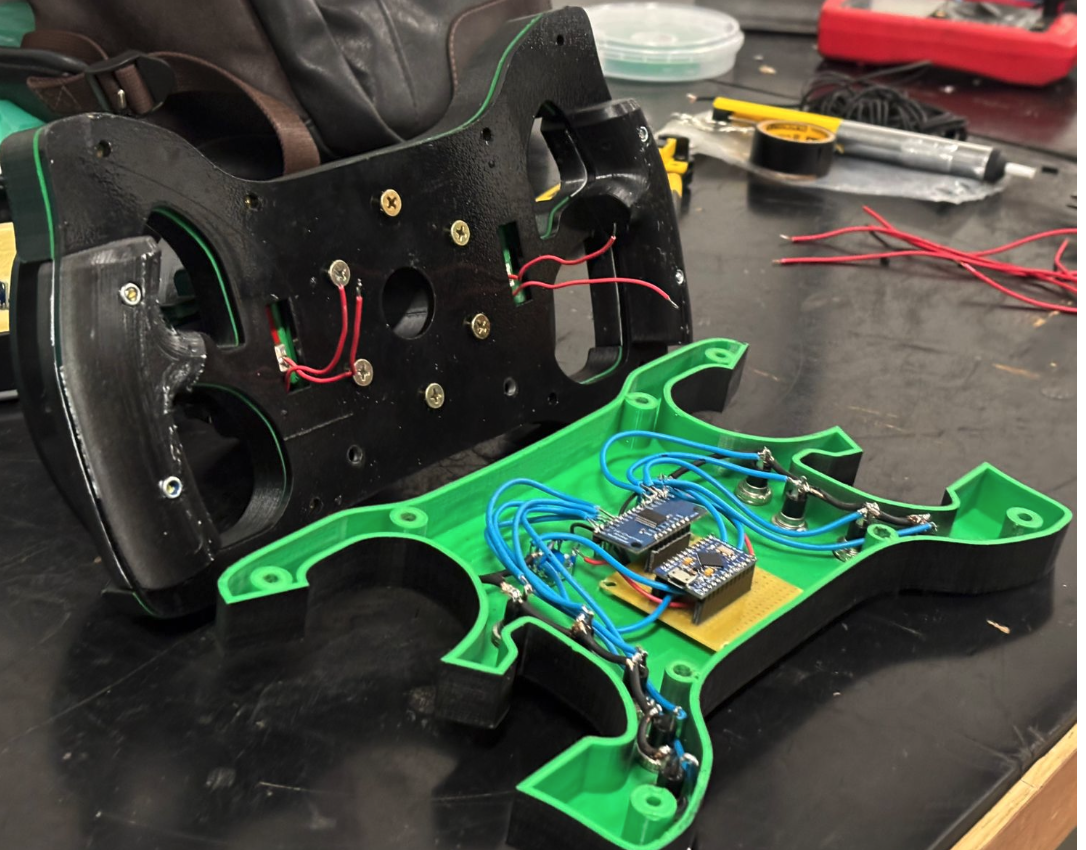 Figura 5: Volante Aberto
Figura 5: Volante Aberto
O que irá controlar esse componente:
Os paddle shifters são micro-switches que detectam a troca de marcha para cima e para baixo no simulador, gerando bordas digitais a cada acionamento. Os encoders rotativos EC11 serão utilizados como seletores multifunção para ajustes como brake bias, pressão de turbo, faróis, limpadores, pit limiter e DRS. A rotação envia comandos incrementais, e o botão central atua como entrada adicional. O Arduino Pro Micro interpreta os sinais e envia os comandos ao simulador, permitindo configuração livre pelo usuário. Já os botões 12 mm, com contato normalmente aberto, são usados para funções auxiliares como ajustes diversos nas configurações do carro, navegação em menus, ajustes de DRS/ERS e acionamento do freio de mão. Todos esses comandos são conectados ao Arduino Pro Micro, que lê cada sinal digital (nível 0 ou 1) em seus pinos configurados com resistores de pull-up internos e dispara automaticamente as ações correspondentes na aplicação de simulação.
Componentes Envolvidos:
2× micro-switch de alavanca (paddle shifters) 10 botões sem trava 12 mm Encoders rotativos EC11 com push-button integrado 1× MUX analógico/digital HC4067 Arduino Pro Micro: pinos digitais configurados como entrada com pull-up
Justificativa de Escolha:
A adoção dos micro-switches e dos botões justifica-se pelo realismo tátil que ambos proporcionam e pela robustez e durabilidade inerentes a esses componentes, que suportam milhões de ciclos de acionamento sem apresentar falhas. Além disso, por serem contatos digitais (nível 0 ou 1), sua integração ao Arduino Pro Micro é simples e direta, dispensando qualquer condicionamento analógico. Esses dispositivos oferecem excelente custo-benefício, pois são amplamente disponíveis no mercado, de baixo custo e capazes de resistir às exigências mecânicas e elétricas de um simulador de alto desempenho. A escolha dos encoders EC11 se deve à sua versatilidade, tamanho compacto e integração direta com o Arduino. Eles combinam rotação com botão em um único componente, facilitando a adição de múltiplas funções configuráveis no volante com baixo custo e boa resposta tátil.